
รายละเอียดสินค้า
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
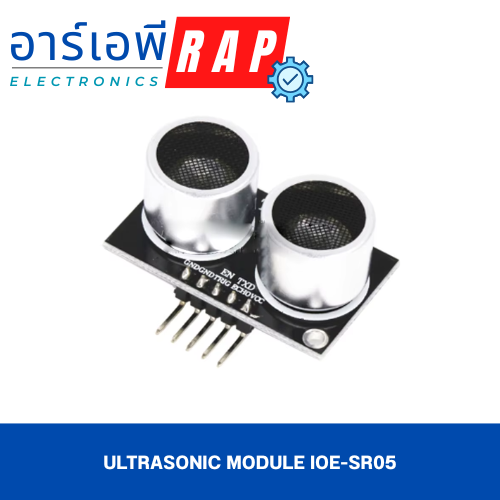
IOE-SR05 โมดูลเซ็นเซอร์วัดระยะทาง Ultrasonic IOE-SR05 Range ultrasonic module ttl serial port output
เซ็นเซอร์วัดระยะทางด้วยเสียง Ultrasonic รุ่น IOE-SR05 ใช้ไฟเลี้ยง 3.3-5V ให้สัญญาณเอาต์พุตแบบ Serial TTL
IOE-SR05 ULTRASONIC RANGING MODULE FEATURES:
small size, PCB board size is only 2.2 * 3 .6CM, suitable for use with high size requirements;
at least one IO data port can accept the hexadecimal data of the measured distance; with the data output enable terminal, it can be controlled by the IO port or directly grounded!
the measurement distance period is only 18ms, which greatly reduces the measurement time, especially for the use of robot control;
reached the theoretical no blind zone, basically no blind zone test range;
OVERRANGE AUTOMATICALLY RETURN AAAA DATA, REDUCE THE WAITING TIME AFTER OVERRANGE;
there is a red LED on the back to indicate the working status, when there is an obstacle, the LED will light up
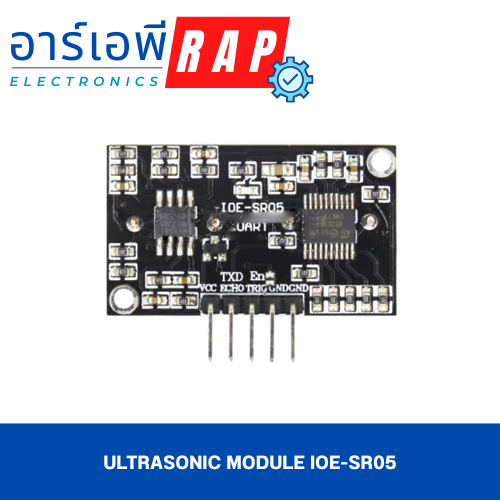
ultrasonic ranging module wiring mode:
five 2.54mm pitch pins:
VCC - wide voltage input: support 3v-5.5v
TxD——(Serial output, RXD for microcontroller or TTL board;)
Enable-(Enable end, module works when =0, does not work when =1, PCB printing Trig),
GND – POWER SUPPLY GROUND
GND – POWER SUPPLY GROUND
Data format:
THE MODULE OUTPUTS 4 BYTES AT A TIME IN THE FORMAT OF: 0XFF + H_DATA + L_DATA + SUM
0XFF: Is a set of starting data that is used for judgment.
H_DATA: 8 bits higher than the distance data.
L_DATA: 8 bits lower than the distance data.
SUM: Data and, for validation. Its 0XFF + H_DATA + L_DATA = SUM (only 8 bits lower).
NOTE: H_DATA SYNTHESIZES 16 BITS OF DATA WITH L_DATA, I.E. DISTANCE VALUES IN MILLIMETERS.
H_DATA * 256 +L_DATA
OVERRANGE FIXED OUTPUT: FF AA AA 53
THERE IS A RED LED ON THE BACK TO INDICATE THE WORKING STATUS, AND WHEN THERE IS AN OBSTACLE, THE LED WILL LIGHT UP.
Electrical parameters: 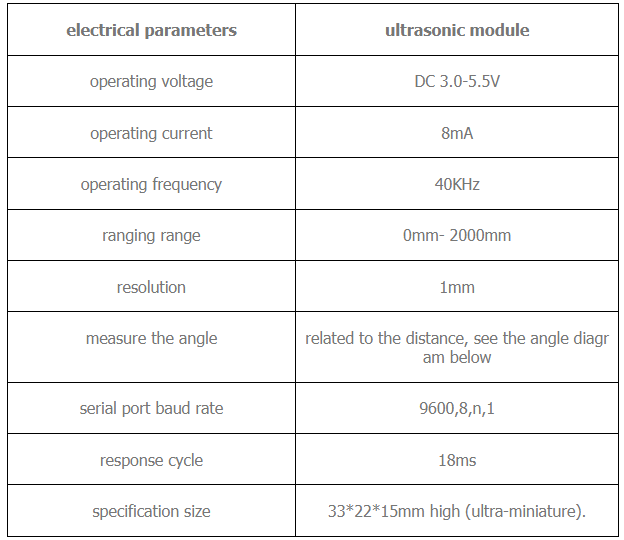 How to use this product: after confirming the polarity of the power supply and the voltage is connected, the module will automatically measure in 18ms cycle, if the echo is received, it will output the protocol data containing distance information (in mm) through the TXD output, and the output is very stable after actual testing.
how the module works:
the module automatically sends 8 40khz square waves with a period of 18ms to automatically detect whether there is a signal return;
THERE IS A SIGNAL RETURN, AFTER INTERNAL CALCULATION AND PROCESSING, THE DISTANCE INFORMATION IS OUTPUT THROUGH TXD;
main features of the module:
ultra-miniature, only equivalent to two transmitters, the area of the receiving head, can no longer be small.
there is no blind spot (the error of forming triangles within 12mm is large).
the reaction speed is fast, the measurement period of 18ms, it is not easy to lose the high-speed target.
the transmitter head, the receiving head is close to each other, and the measured target is basically in a straight line relationship (within 12mm or a large triangle, this is the transmitter, the physical shape of the receiving head is determined).
THERE ARE LED INDICATIONS ON THE MODULE, WHICH IS CONVENIENT FOR OBSERVATION AND TESTING!
frequently asked questions (faq):
1: ultrasonic ranging principle
Ultrasonic is a sound with a relatively high frequency and strong directivity. The principle of ultrasonic ranging is to use the ultrasonic propagation speed in the air to be known, measure the time when the sound wave encounters an obstacle after transmission and reflect back, and calculate the actual distance from the transmission point to the obstacle according to the time difference between the transmission and reception. It can be seen that the principle of ultrasonic ranging is the same as the principle of radar.
The formula for ranging is expressed as: L = C× T
formula in which L is the measured distance length; C is the propagation speed of ultrasonic waves in the air; T is the time difference between the measured distance propagation (T is half of the value of the transmitted time to receive).
Known ultrasonic speed C=344m/s (20°C room temperature)
Ultrasonic propagation speed error
The propagation speed of ultrasonic waves is affected by the density of air, the higher the density of air, the faster the propagation speed of ultrasonic waves, and the density of air has a close relationship with temperature, the approximate formula is: C = C0 + 0.607 × T ° C
formula: C0 is zero when the sound wave speed is 332m / s;
T is the actual temperature (°C).
40khz ultrasonic wavelength is about 8mm, and the detection is the peak level, so it is easy to error a wavelength of 8mm, so it is not possible to achieve very high precision, and do not have to care about the influence of temperature (temperature influence is second)
2: why is the farthest distance only 2000mm?
this sensor is designed for smart cars and other micro equipment, suitable for small range, small space, closed space occasions, we all know, ultrasonic transmission speed is low, long attenuation time, if blindly pursue distance, it will lead to long response time, loss of target, in the indoor and other closed occasions will form multiple emission shocks, the sensor can not work properly.
the following analyzes the distance problem from the sensor's reaction time:
ultrasonic air speed of about 340 meters per second, converted into milliseconds, is 340mm / ms, detection distance of 2000mm, the distance detected to the echo is 4000mm, ultrasonic transmission time is 12ms, plus circuit delay, sensor energy delay, and then reserve some protection time (let the last ultrasonic energy disappear), each measurement time is 18ms.18ms the reaction speed is suitable for smart cars, and the target will not be lost when moving at high speed.
Now there is a sensor on the market is 5 meters, this 5 meters is the maximum distance, the detection target is generally a large emission surface such as the wall, for small targets is impossible to achieve, first regardless of how far this small target is, we analyze from the sensor's reaction time. The timing of this sensor is different from ours in that it receives feedback first and then feeds back from echo's pulse width, rather than from the jet lag between echo and trig, doubling the sensor's response time! The minimum response time of this 5-meter sensor is (the minimum time of 1 meter calculated above is 6ms): 5 *6*2=60ms! Even if the fastest measurement cycle of 60ms is too slow for smart cars! When the master CPU detects the target, the car may have crashed!
3: your ultrasonic transmitter and receiver head are very close, why?
the ultrasonic sensor we see is generally separated from the transmitter and the receiving head, because the closer to the transmitter head, the higher the transverse wave energy is transmitted to the receiving head, resulting in a large blind spot, or even unable to work properly, so that the transmitter and the receiving head are separated from the point is not allowed, so the disadvantage of the belt is the transmitter, and the triangle connection between the receiving head and the measuring object is! obviously, the closer the distance, the greater the angle of the triangle, which brings error. the transmitter and receiver heads of the sensors are closely adjacent, and the detection target is a parallel relationship, not a triangular relationship.
4: does your ultrasonic module really have no blind spots?
the originality of this ultrasonic sensor eliminates lateral interference waves and the minimum measurement distance starts from 0.
5: different objects measure different distances?
right! because ultrasonic waves are sounds with higher frequencies, different materials and shapes of objects have different absorption rates of sound, different reflection angles, and only the energy reflected to the receiving head (that is, the direction of ultrasonic emission) will be detected, so the effective measurement distance of different objects is different. in general, the flat smooth object (such as the mirror surface) reflection distance is the farthest, usually said that the maximum detection distance refers to this type of object, the detection distance of small objects is very close, such as fine cotton line, the area is small, and absorb the sound, it can not be detected.
the maximum detection distance for an actual object is listed below:
ballpoint pen, 200mm
hand, 400mm
1mm thick wire with plastic sleeve, 30mm
vernier caliper, 450mm
human body (wear thick clothes), 400mm
wall, 2.200mm (maximum about 2300mm, vertical measurement required)
1mm thick cotton thread, undetectable
bamboo toothpick, 40mm
   |
| เงื่อนไขอื่นๆ |
|
| Tags |
วิธีการสั่งซื้อสินค้า

เลือกสินค้าที่คุณต้องการ โดยคลิกปุ่มสั่งซื้อ / หยิบลงตะกร้า

เมื่อเลือกสินค้าครบแล้ว ให้คลิกปุ่มสั่งซื้อสินค้าในตะกร้าสินค้า

กรอกรายละเอียดให้ครบถ้วน จากนั้นคลิกปุ่มยืนยันการสั่งซื้อ

ชำระค่าสินค้าและบริการ สามารถดู วิธีการชำระเงินได้ที่นี่

แจ้งการชำระเงินผ่านทางหน้าเว็บไซต์ แจ้งชำระเงิน

เมื่อทางร้านตรวจสอบรายการชำระเงินเรียบร้อยแล้ว จะจัดส่งสินค้าให้คุณทันที
วิธีการชำระเงิน
เมื่อลูกค้าชำระเงินแล้ว ส่งหลักฐานการชำระเงินที่
การจัดส่งสินค้า
1. ส่งสินค้าผ่าน Flash express 70 บาท ใช้เวลา 1-2 วัน2. ส่งสินค้าทุกวันจันทร์-เสาร์ จัดส่งสินค้าหลังจากแจ้งโอนภายใน 1-2 วันทำการ
การขอใบกำกับภาษี บิล VAT สำหรับเบิก มหาวิทยาลัย โรงเรียน หน่วยงานราชการ บริษัท ห้างหุ้นส่วน ร้านค้า ฯลฯ
1. ราคาสินค้าที่หน้าเว็บ เป็นราคารวม VAT แล้ว ไม่ต้องเพิ่มเงิน
2. การขอใบกำกับภาษี บิล VAT ให้แจ้งข้อมูลตรงช่อง "เพิ่มเติมถึงร้านค้า" ตอนทำรายการสั่งซื้อ
1. ชื่อหน่วยงาน เช่น มหาวิทยาลัย โรงเรียน บริษัท ห้างหุ้นส่วน ร้านค้า ฯลฯ
1. ชื่อหน่วยงาน เช่น มหาวิทยาลัย โรงเรียน บริษัท ห้างหุ้นส่วน ร้านค้า ฯลฯ
2. ที่อยู่หน่วยงาน
3. เลขที่ประจำตัวผู้เสียภาษี
4. สาขา
โปรดตรวจสอบความถูกต้อง ตัวสะกด เว้นวรรค ของข้อมูลให้เรียบร้อย
โปรดตรวจสอบความถูกต้อง ตัวสะกด เว้นวรรค ของข้อมูลให้เรียบร้อย
เพราะใบกำกับภาษี ไม่สามารถเปลี่ยนแปลงหรือแก้ไขได้ หลังซื้อสินค้าค่ะ
กรณีที่ไม่ได้นำไปใช้เบิก :
ทางร้านออกเป็น ใบส่งของและใบเสร็จรับเงิน/ใบกำกับภาษีอย่างย่อ แนบไปกับสินค้า
กรณีที่ไม่ได้นำไปใช้เบิก :
ทางร้านออกเป็น ใบส่งของและใบเสร็จรับเงิน/ใบกำกับภาษีอย่างย่อ แนบไปกับสินค้า
ชำระเงินผ่านธนาคาร
นโยบายการเปลี่ยนหรือคืนสินค้า
นโยบายการเปลี่ยนสินค้า/คืนสินค้า
กรณีขอเปลี่ยนสินค้า
ซึ่งเป็นความความผิดพลาดจากกระบวนการผลิตหรือกระบวนการขนส่ง
- สามารถเปลี่ยนเป็นชนิดเดิม หรือชนิดใหม่ได้ โดยสินค้าที่เปลี่ยนต้องมีมูลค่าเท่ากับ หรือมากกว่าชนิดเดิม
- กรณิสินค้าที่เปลี่ยนราคาสูงกว่า ลูกค้า จะต้องชำระเงินเพิ่ม
- กรณิสินค้าที่เปลี่ยนราคาต่ำกว่า ร้านขอสงวนสิทธิ์การคืนเงินส่วนต่าง
- ร้านส่งสินค้าผิดรุ่น, สี หรือขนาด ให้กับลูกค้า
- ร้านจัดส่งสินค้าที่มีลักษณะแตกต่าง หรือไม่มีส่วนคล้ายคลึงกับรูปภาพสินค้าที่ได้แสดงไว้
- ร้านจัดส่งสินค้าที่มีสภาพชำรุด เสียหาย และไม่สามารถใช้งานได้ ให้กับลูกค้า (ลูกค้าต้องเก็บสินค้าไว้ พร้อมแสดงหลักฐานการซื้อสินค้า)
ร้านจะรับเปลี่ยนสินค้าหลังจากลูกค้าได้รับสินค้าแล้ว ภายใน 7 วัน หากเกินวันดังกล่าว ร้านค้าขอสงวนสิทธิ์ ในการรับคืนสินค้า
กรณีขอคืนเงิน
จากกรณีสินค้ามีความบกพร่องเสียหายอันเกิดจากผู้ผลิต ลูกค้าได้รับสินค้าไม่ตรงตามใบสั่งซื้อ สินค้าได้รับความเสียหายระหว่างการจัดส่ง
เงื่อนไขและวิธิปฏิบัติการคืนเงิน
- ร้านจะทำการคืนเงินให้แก่ลูกค้า ในกรณีที่ไม่สามารถหาสินค้า มาเปลี่ยน หรือทดแทนสินค้าเดิมที่ลูกค้าได้สั่งซื้อไป ในกรณีที่สินค้าชำรุดเสียหายจากทางร้าน หรือสินค้าชิ้นนั้นๆหมดไป
- กรณีการขอคืนเงิน ลูกค้าจะต้องนำส่งเอกสารและหลักฐาน ใบเสร็จรับเงิน/ใบกำกับภาษี, เลขที่บัญชีโอนเงินของลูกค้า เพื่อให้ทางร้านดำเนินเรื่องการทำจ่ายเงินคืนเข้าบัญชีของลูกค้า โดยมีระยะเวลาประมาณ 10-15 วันทำการ และ ทางร้านจะทำการแจ้งให้ลูกค้าทราบเมื่อได้มีการจ่ายเงินคืนเรียบร้อยแล้ว



▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม